 ジャンピングトルク技術情報 No.
0006
ジャンピングトルク技術情報 No.
0006
ジャンピングトルクとは
タイミングベルトは、ベルト歯とプーリ溝のかみ合いにより動力を伝達しますが、高負荷が掛かる射出成形機、産業用ロボット等では、ジャンピング(歯飛び)が問題になることがあります。
タイミングベルトのジャンピング(歯飛び)とは、ベルト歯がプーリ歯を乗り越えてしまう現象のことです。
ジャンピング(歯飛び)を起こすと動力を伝達できなくなるだけではなく、歯欠けや切断に至り、装置の機能が停止してしまいます。
以下にジャンピング(歯飛び)のスローモーション動画を示します。
ジャンピング(歯飛び)が発生している様子がわかるかと思います。
ジャンピング(歯飛び)の予測
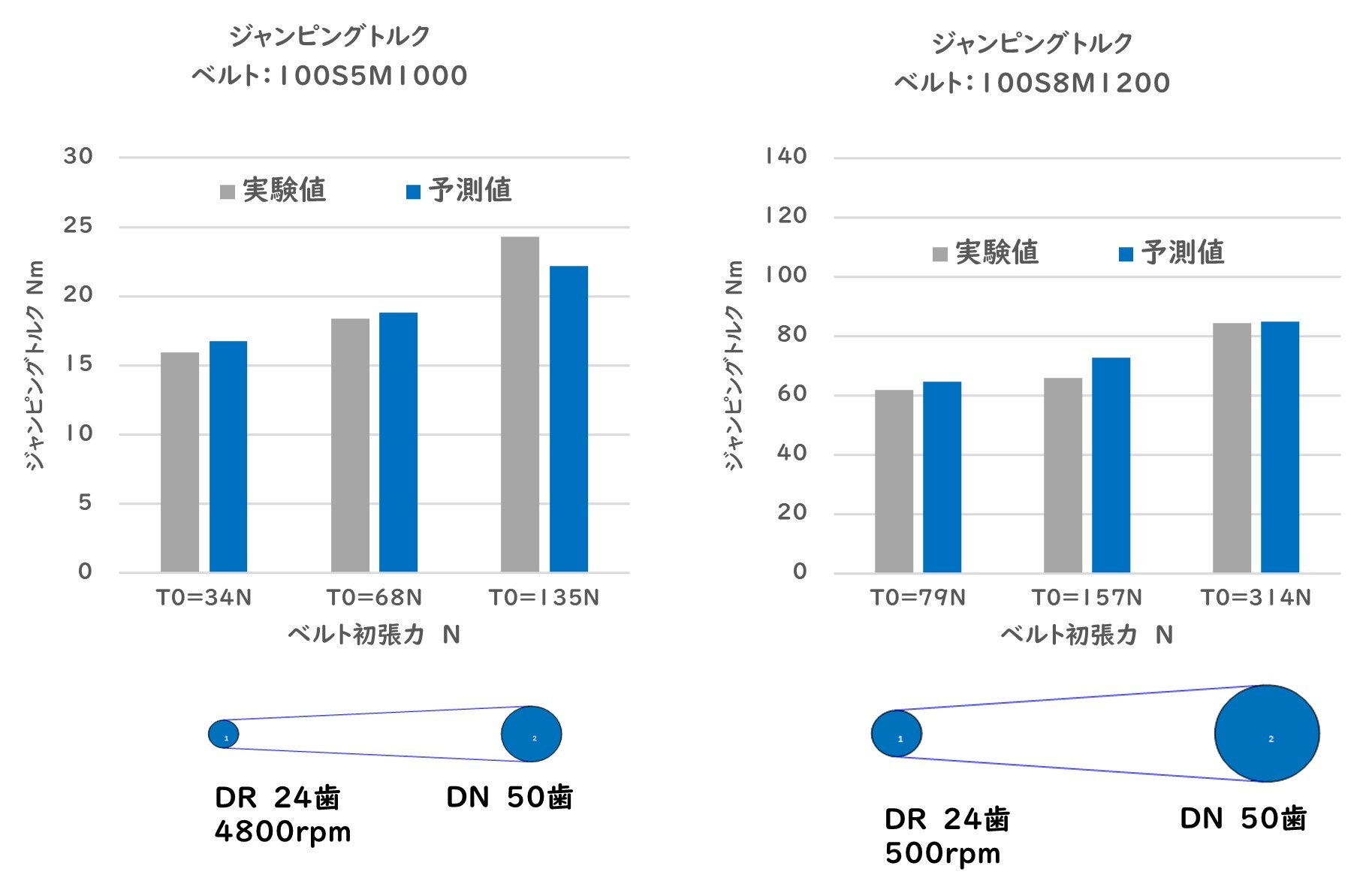
ジャンピング(歯飛び)発生直前の最大トルクを『ジャンピングトルク』と呼びます。
ジャンピング(歯飛び)は、プーリ径、スパン長、巻き付け角、ベルトの伸び特性、初張力などの影響を受け、これまで予測が困難なため、実機や台上試験機などにより実測して確認をしていましたが、この度お客様の要望にお応えし理論式を構築しました。
これにより、お客様の装置設計の初期段階からジャンピングトルクを予測できるようになりました。
下図は、ジャンピングトルクの予測値と実験値を比較したグラフです。
予測値の精度の高さをご理解いただけると思います。
ジャンピングの基本メカニズムとジャンピングトルク予測式については、弊社社員が執筆しました下記論文に詳しく記載されております。
論文タイトル:タイミングベルトのジャンピング現象とジャンピングトルク予測
DOI:10.1299/transjsme.21-00250
世界初となる、実用的なジャンピングトルク予測式の構築と、その妥当性の検証を行っております。
なお、本論文は、2022年の日本機械学会学術誌(和文)年間アクセス数トップとなりました。
(2022年1月~2022年12月の期間での集計)
この技術情報ページの内容についてご不明な点がございましたら、お問い合わせフォームを通じてお気軽にお問い合わせください。